David Sánchez
Environment Artist at DNEG
Home
Resume
Portfolio
All
Environment
Props&Characters
First projects
Blog
Contact
Houdini FX: RBD Solvers, Bullet y problemas con geometría cóncava.
Article / 10 February 2019
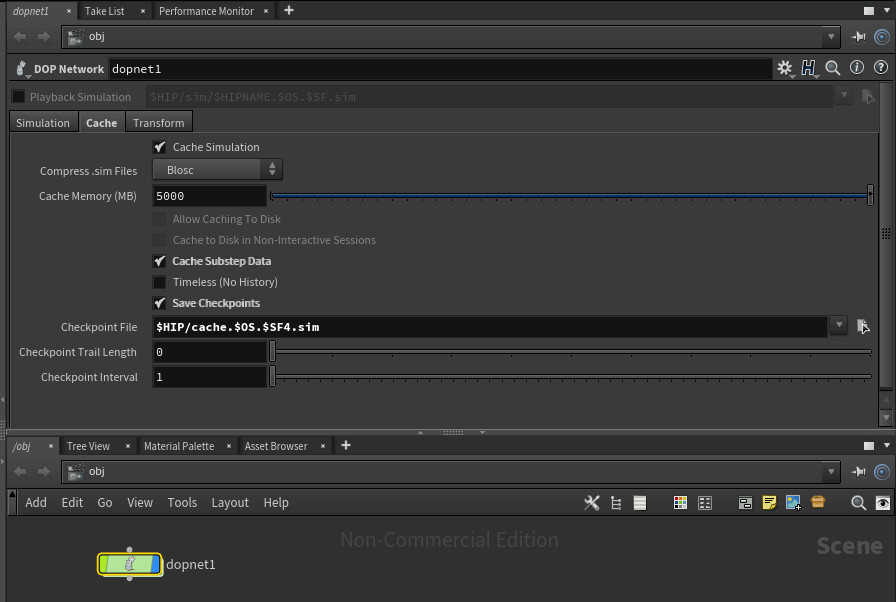
Houdini FX: Cómo retomar una simulación fallida. (Checkpoints)
General / 10 February 2019
Reducción de ruido en render
General / 10 February 2019
Report User